Shangqun Yu
about me
LGRC
740 N Pleasant St
Amherst, MA 01002
Hello and welcome to my website! I’m Shangqun, a PhD student in Computer Science at UMass. My research focuses on enabling legged robots to walk, run, and jump using model-based optimal control and model-free reinforcement learning methods.
news
selected publications
-
 Diffusion Policy for Coordinated Control of a Nonholonomic Mobile Base and Dual Arms in Door Opening and PassingIn preprint, 2025
Diffusion Policy for Coordinated Control of a Nonholonomic Mobile Base and Dual Arms in Door Opening and PassingIn preprint, 2025 -
 Impedance Matching: Enabling an RL-Based Running Jump in a Quadruped RobotIn 2024 21st International Conference on Ubiquitous Robots (UR), 2024
Impedance Matching: Enabling an RL-Based Running Jump in a Quadruped RobotIn 2024 21st International Conference on Ubiquitous Robots (UR), 2024 -
 Integration of Riemannian Motion Policy with Whole-Body Control for Collision-Free Legged LocomotionIn 2023 IEEE-RAS 22nd International Conference on Humanoid Robots (Humanoids), 2023
Integration of Riemannian Motion Policy with Whole-Body Control for Collision-Free Legged LocomotionIn 2023 IEEE-RAS 22nd International Conference on Humanoid Robots (Humanoids), 2023 - NeurIPS
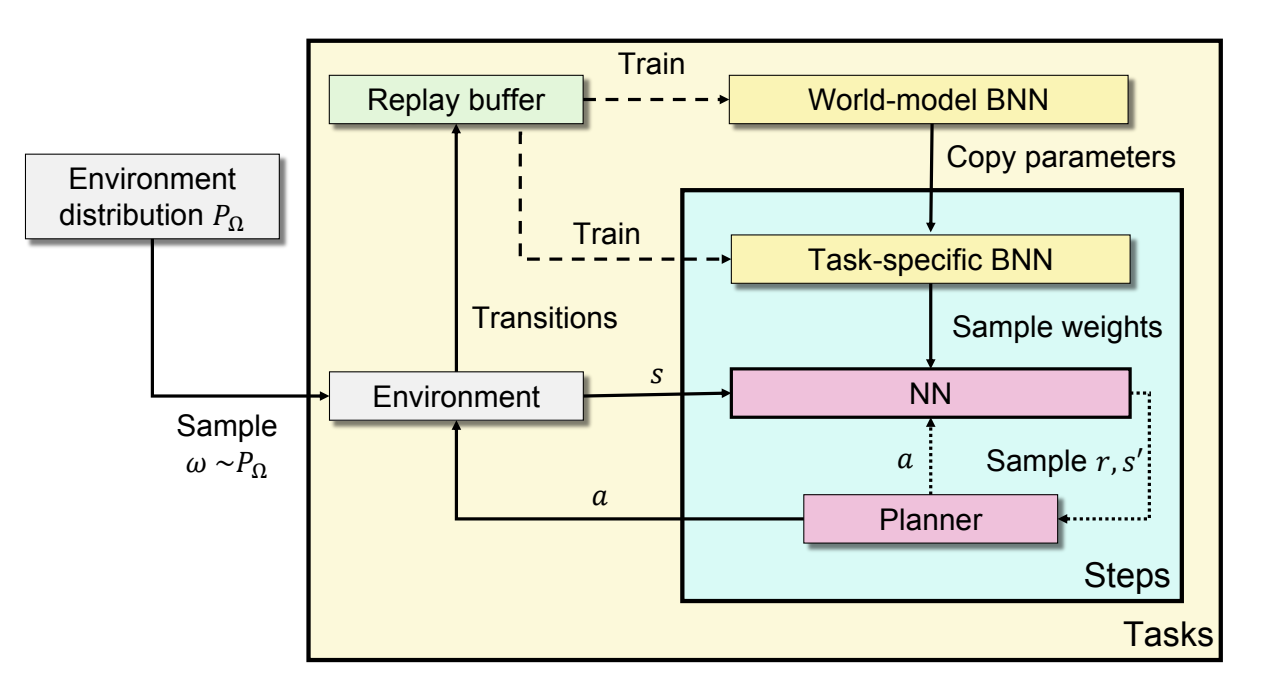 Model-based Lifelong Reinforcement Learning with Bayesian ExplorationIn Advances in Neural Information Processing Systems, 23–29 jul 2022
Model-based Lifelong Reinforcement Learning with Bayesian ExplorationIn Advances in Neural Information Processing Systems, 23–29 jul 2022 - AAAI
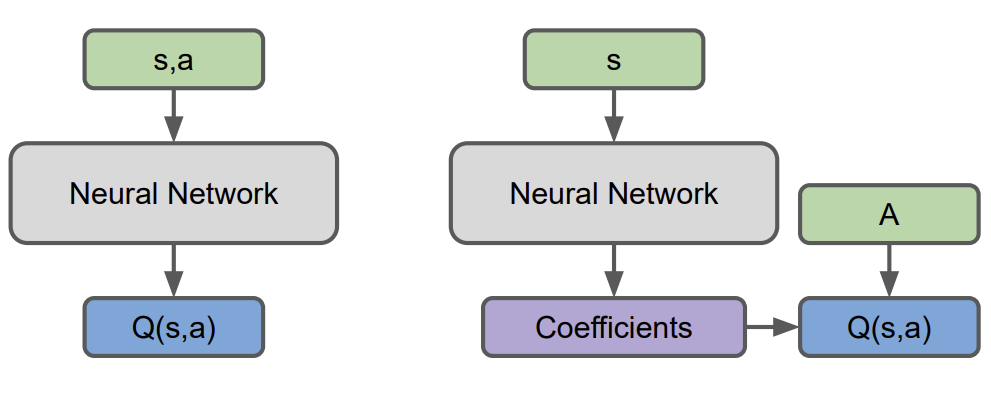 Q-functionals for Value-Based Continuous ControlProceedings of the AAAI Conference on Artificial Intelligence, Jun 2023
Q-functionals for Value-Based Continuous ControlProceedings of the AAAI Conference on Artificial Intelligence, Jun 2023