Shangqun Yu cv scholar
🤖 Building robots for the real world.
Hi, I’m Shangqun(Simon)! I’m a Computer Science Ph.D. student at the University of Massachusetts Amherst, advised by Donghyun Kim. Previously, I obtained my Master’s degree from Brown University, advised by Michael Littman and George Konidaris, where I worked on reinforcement learning. I aim to be a full-stack roboticist dedicated to creating systems that achieve agile and robust locomotion and manipulation, traversing complex real-world terrains safely and reliably. My goal is to expand their use in search and rescue missions, disaster response, and autonomous exploration, and eventually to assist humans with their daily tasks.
news
| May 13, 2026 | 🏅Quiet Locomotion (Oral) will be presented at ICRA’26! |
|---|---|
| Feb 1, 2026 | Our paper submitted to 2026 ICRA got accepted! |
| Sep 9, 2024 | Our paper submitted to 2024 Humanoids got accepted! |
| Jun 30, 2024 | Our paper submitted to 2024 IROS got accepted! |
| Apr 4, 2024 | Our paper submitted to 2024 Ubiquitous Robots got accepted! |
publications
-
 Impedance Matching: Enabling an RL-Based Running Jump in a Quadruped RobotIn 2024 21st International Conference on Ubiquitous Robots (UR) 2024
Impedance Matching: Enabling an RL-Based Running Jump in a Quadruped RobotIn 2024 21st International Conference on Ubiquitous Robots (UR) 2024 -
 Integration of Riemannian Motion Policy with Whole-Body Control for Collision-Free Legged LocomotionIn 2023 IEEE-RAS 22nd International Conference on Humanoid Robots (Humanoids) 2023
Integration of Riemannian Motion Policy with Whole-Body Control for Collision-Free Legged LocomotionIn 2023 IEEE-RAS 22nd International Conference on Humanoid Robots (Humanoids) 2023 -
 Meta-learning Parameterized SkillsIn Proceedings of the 40th International Conference on Machine Learning 23–29 jul 2023
Meta-learning Parameterized SkillsIn Proceedings of the 40th International Conference on Machine Learning 23–29 jul 2023 -
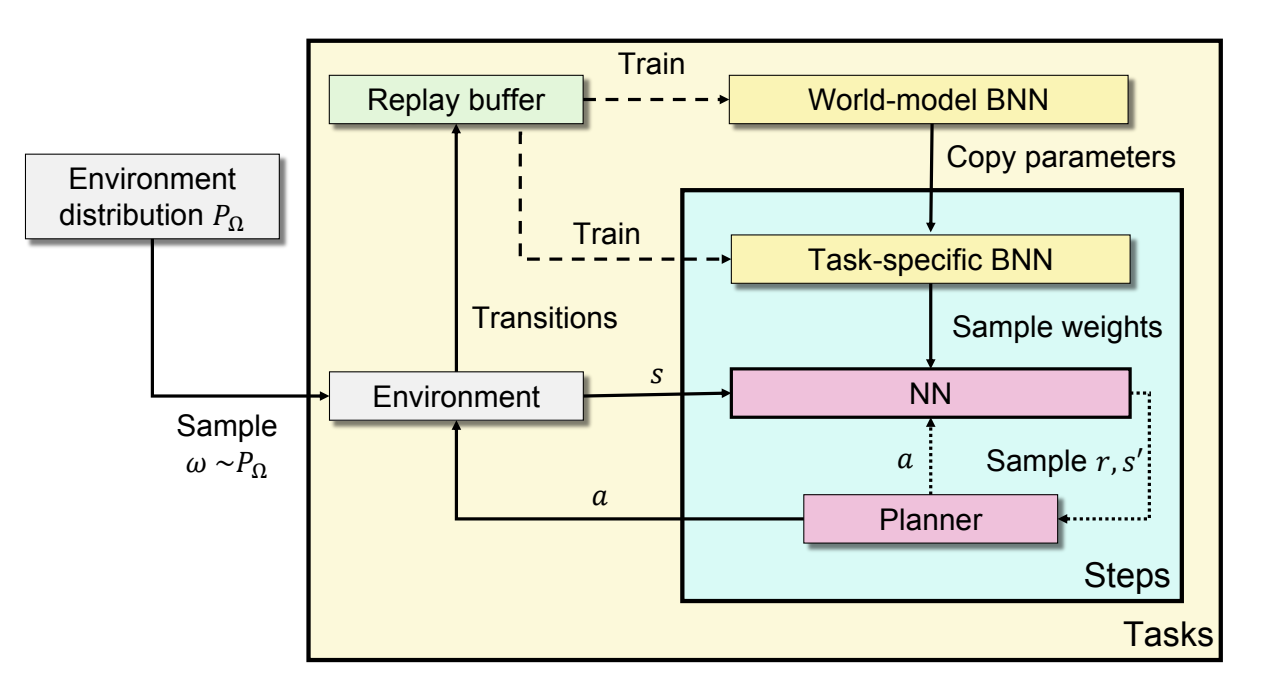 Model-based Lifelong Reinforcement Learning with Bayesian ExplorationIn Advances in Neural Information Processing Systems 23–29 jul 2022
Model-based Lifelong Reinforcement Learning with Bayesian ExplorationIn Advances in Neural Information Processing Systems 23–29 jul 2022 -
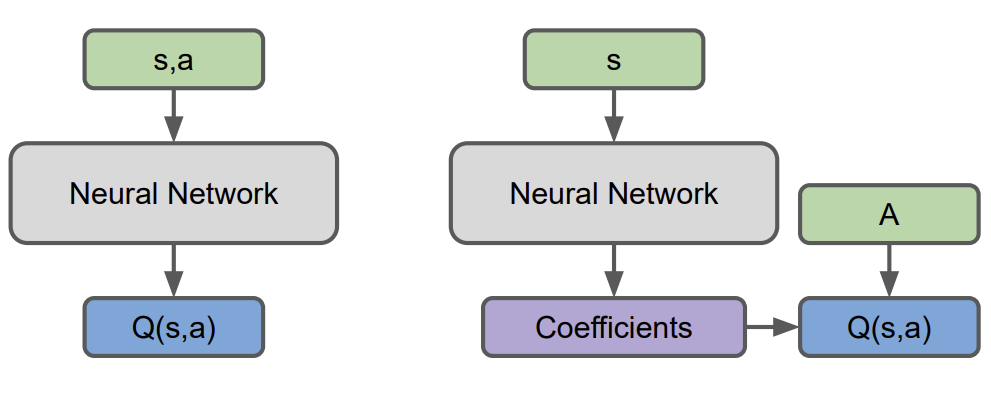 Q-functionals for Value-Based Continuous ControlProceedings of the AAAI Conference on Artificial Intelligence Jun 2023
Q-functionals for Value-Based Continuous ControlProceedings of the AAAI Conference on Artificial Intelligence Jun 2023